Form factors
One design surface. Every topology.
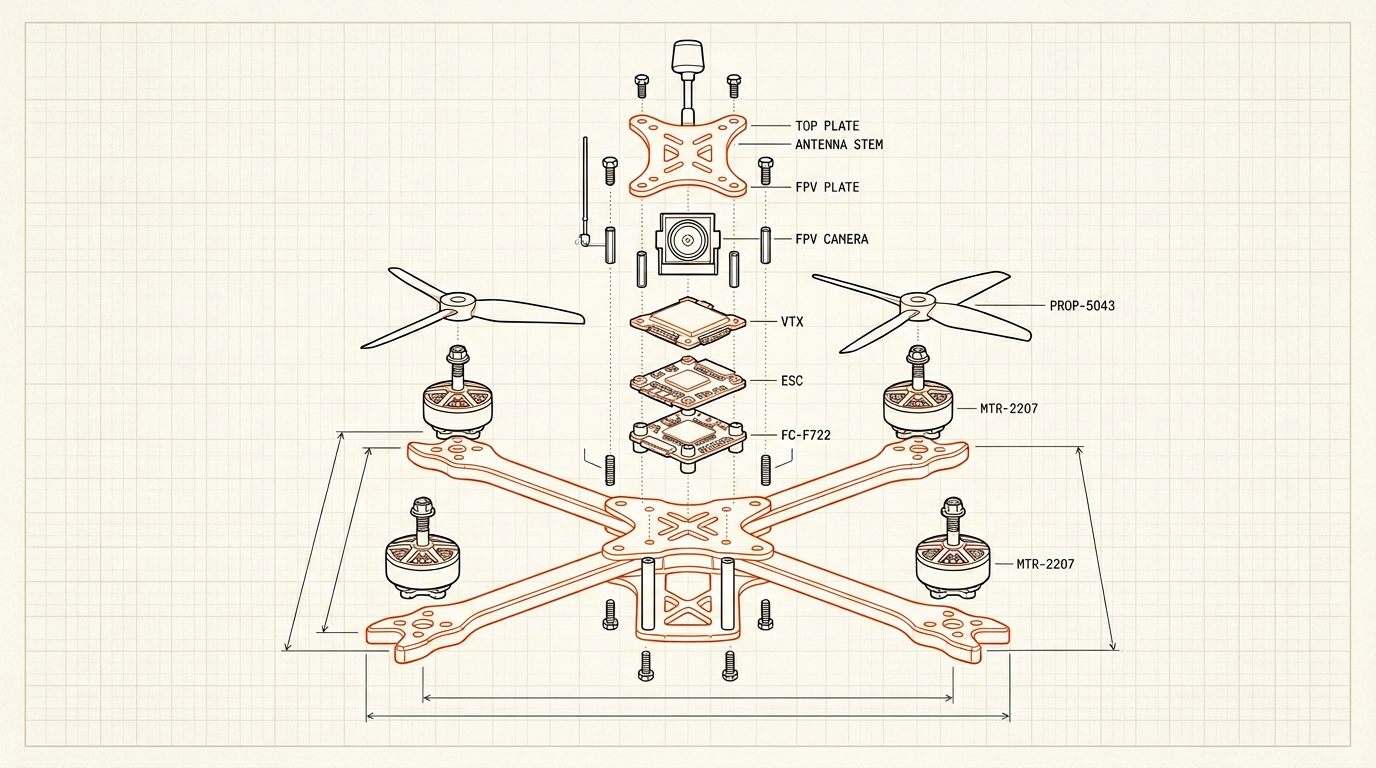
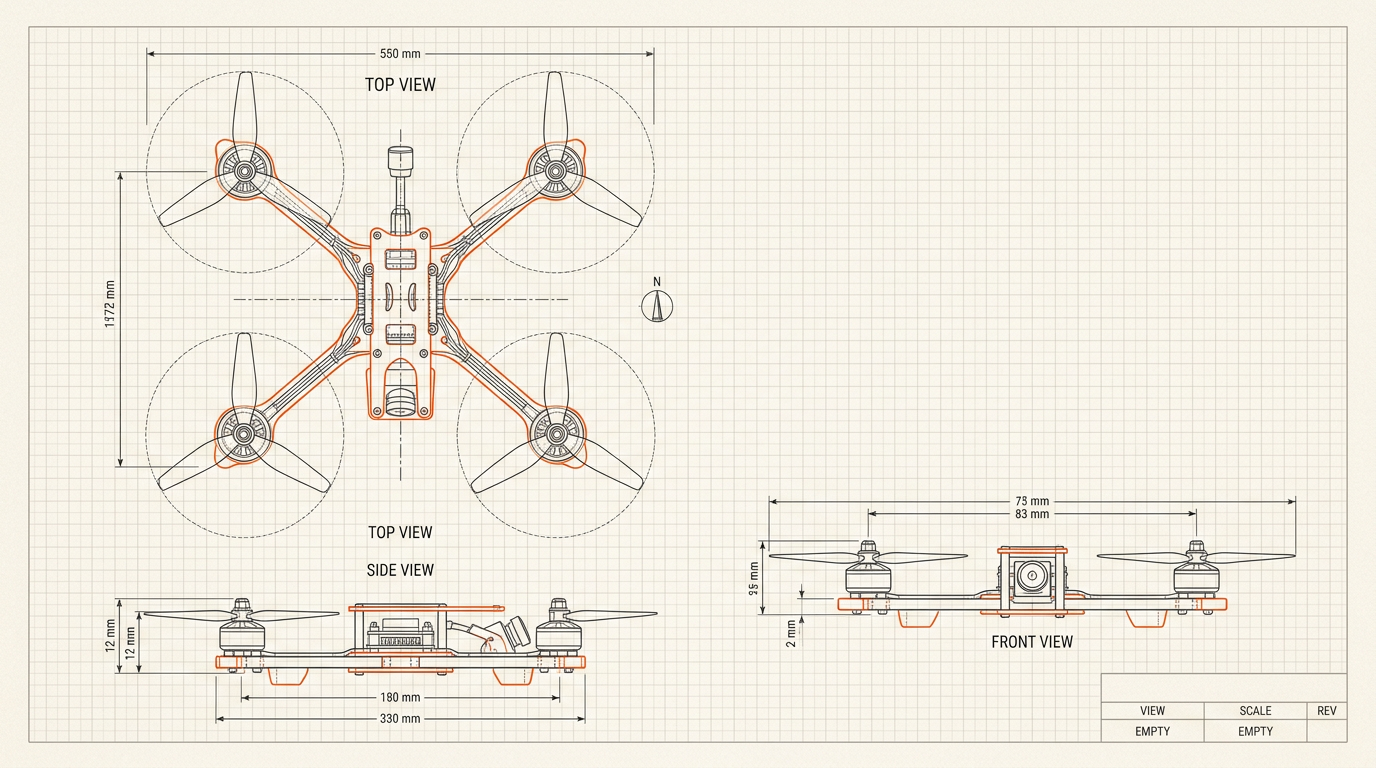
Multirotor
Hover, inspect, carry. The workhorse.
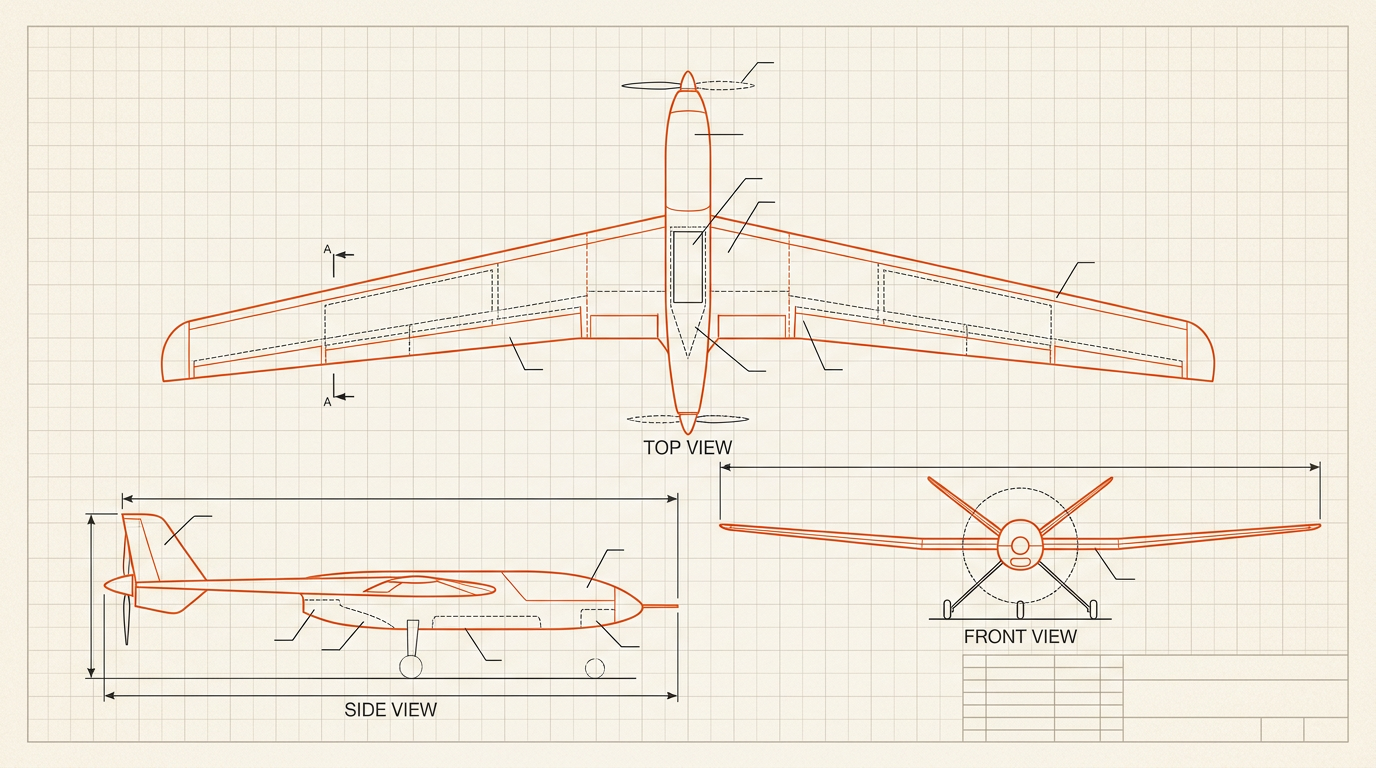
Fixed-wing
Survey, mapping, endurance.
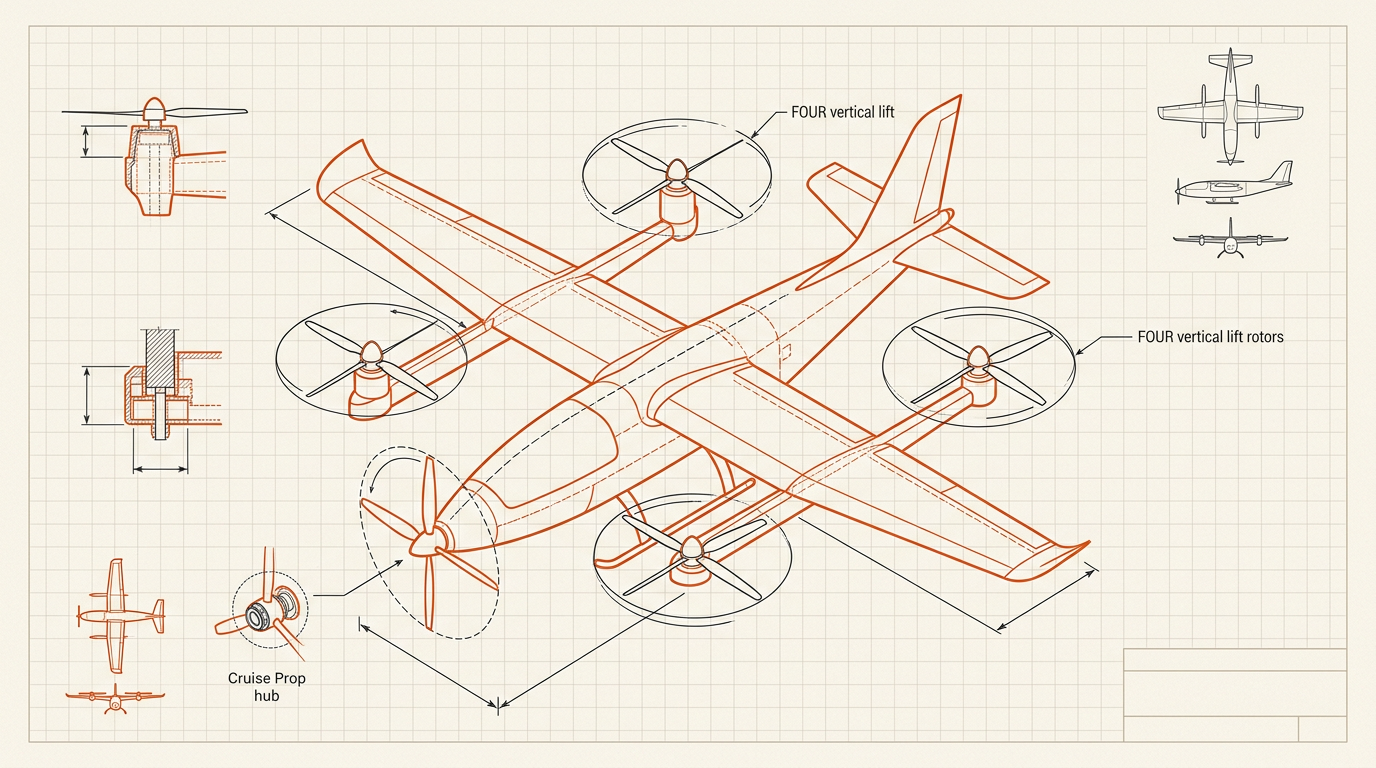
VTOL
Both modes, one airframe.
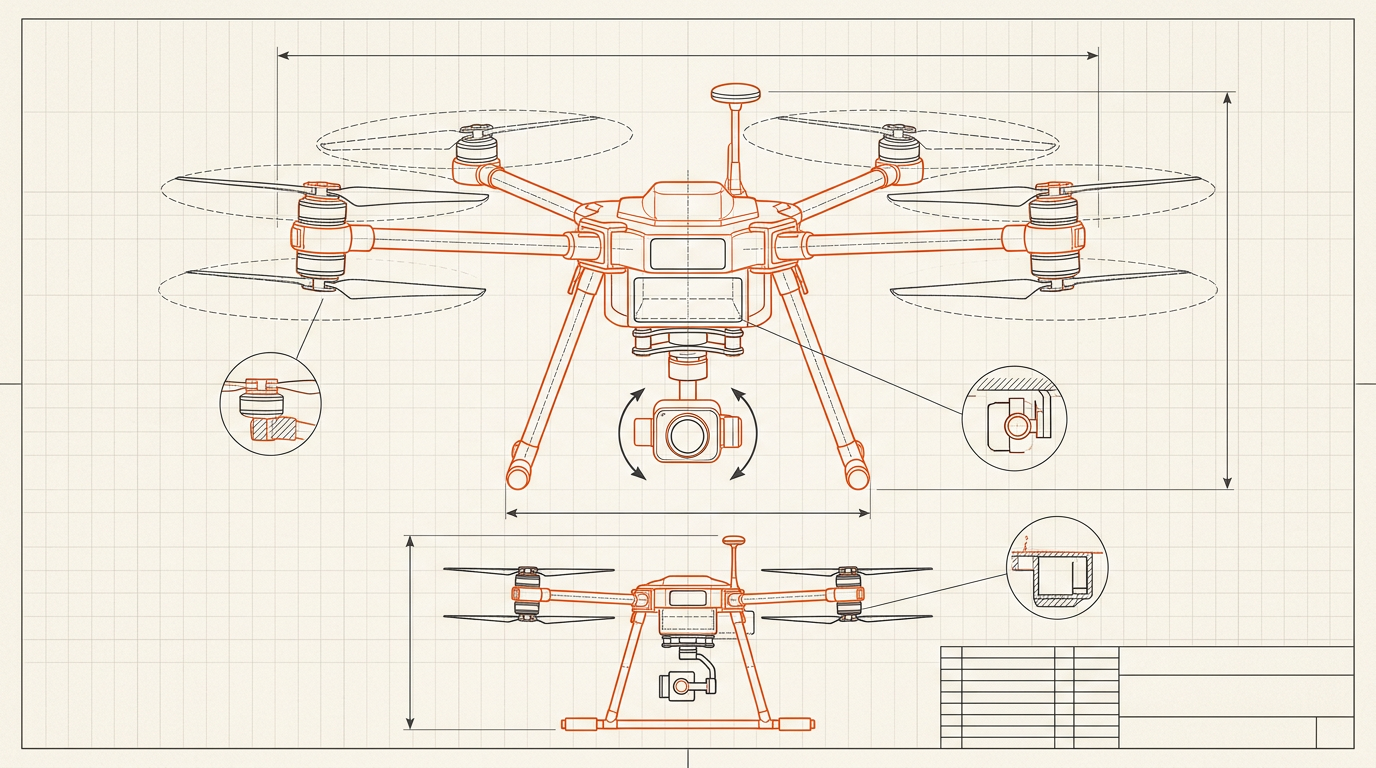
Industrial
Hex and octo with motor-out flight.